



搬运机器人的“大脑”升级:具身智能的四大核心技术
- 2025-04-27 13:46:29
- 21
- aiten
一、什么是具身智能?
具身智能(Embodied Intelligence)是指智能体通过物理身体与环境进行实时交互,从而实现感知、认知、决策和行动一体化的智能形式。具身智能人工智能领域的前沿方向,具身智能系统通常具备感知、认知、决策和行动的能力。具身智能最大的特质就是具备理解力、交互力、规划能力等,较普通机器人有更高的工作效率。

二、具身智能的四大核心技术
1.多模态感知
多模态感知是指智能体通过多种传感器(如视觉、听觉、触觉、力觉、温度等)获取外部环境的多维度信息,并通过融合算法将这些信息整合起来,以实现对周围环境的精确感知。
2.动态建模
动态建模是指实时构建和更新智能体对环境的认知模型,包括环境的几何结构、物体的运动状态、物理特性等。通过动态建模,智能体能够准确地理解环境的当前状态以及可能的变化趋势,为决策和规划提供依据。
3.自主决策
自主决策是指智能体根据感知到的环境信息和自身的任务目标,通过一定的决策算法自主地选择最优的行为方案。
4.群体协同
群体协同是指多个智能体之间通过信息交流和协作,共同完成复杂的任务。通过群体协同,智能体可以共享感知信息、协调行动、分工合作,从而提高任务的执行效率和成功率。
三、具身智能的四大核心技术在搬运机器人上的应用——以AiTEN搬运机器人为例
具身智能的四大核心技术——多模态感知、动态建模、自主决策、群体协同,在搬运机器人领域的应用已实现从单一功能到全场景智能化的突破,显著提升了物流自动化水平。以下海豚之星无人叉车为例,深度解析具体技术落地与行业案例。

1.多模态感知:环境理解的“感官延伸”
海豚之星的无人叉车采用激光雷达+视觉相机+内部传感器的融合方案,构建了立体感知能力,实现对复杂环境的全方位监测。例如,APe15小搬机器人集成了 基于激光雷达与视觉的AI 融合感知技术,可精准应对复杂场景。
其核心包括:
①激光雷达与视觉融合:
采用视觉与激光雷达结合,实现±10mm高精度定位与动态避障,并通过360°安全雷达实时扫描环境,结合深度学习算法识别动态障碍物,支持建图导航、障碍物检测与叉尖防护,安全扫描距离达5米,显著提升狭小空间作业的灵活性和安全性。
②货物识别传感器:
通过智能传感技术实时监测货物重量与重心,防止超载或倾斜。结合AI算法判断抓取力度和路径规划,避免货物损坏。
③3D区感技术:
通过超声波传感器与机械防撞触边的组合,实现三维立体安全防护,显著提升托盘识别和货架定位的准确性。
海豚之星机器人在2024年公示的"一种定位准确的无人AGV迷你搬运车"专利中,其运用多模态导航技术,可应对复杂仓储场景的动态变化。
2.动态建模:环境自适应的“数字孪生”
海豚之星无人叉车通过动态建模技术实现物理环境与虚拟仿真的深度融合,支持无人叉车快速响应环境变化。海豚之星在2025年公示的“一种 AGV 系统用 SLAM 地图自动构建方法” 专利,实现了更高效的 AGV 自主导航能力,可动态构建和更新地图模型,以适应复杂多变的物流环境。
①混合导航:
海豚之星自主研发的激光导航技术结合动态建图,无需铺设磁条或定位点,支持动态场景下的地图构建与路径优化,结合视觉导航形成混合定位系统,显著降低部署成本,同时支持柔性路径规划。
②数字孪生集成:
海豚之星AiTEN推出“WMS+MES+RCS+数字孪生”解决方案,通过虚拟仿真与物理设备的实时映射,实现作业场景的动态建模与预演,优化仓储流程。同时,利用大模型基座驱动数字孪生系统进行场景生成,提高了机器人对未知场景的鲁棒性和自适应性。例如,其AGV无人叉车在虚拟环境中预演搬运路径,再通过真实数据微调,减少实际场景的试错成本。
③实时环境适配:
海豚之星机器人的RDS调度系统支持动态避让与路径调整,避免多车拥堵;其WCS系统实现与电梯、自动门、机械臂等设备的协同控制。动态建模技术将物理环境与虚拟仿真深度融合,减少试错成本,并支持柔性生产需求。
此外,海豚之星搬运机器人的智能控制系统能够实时监测机器人运行状态,如速度、电量、载荷等信息,并根据这些数据动态调整车辆的运动参数,确保机器人在不同工况下的稳定运行,这也是动态建模在控制层面的一种体现。

3.自主决策:AI驱动的“智慧大脑”
搬运机器人的自主决策能力依赖AI算法与实时控制系统的闭环优化。海豚之星的机器人配备了先进的智能控制系统,基于深度学习和强化学习算法,能够根据实时感知的环境信息和任务需求,自主做出决策,如路径规划、避障策略选择等。其自主研发的智能调度及控制系统,可实现多辆 机器人 的高效调度和任务分配,优化车辆的运行效率。在面对复杂物流场景中的突发情况时
搬运机器人车能够迅速做出反应,自动调整运行路径或采取相应的避障措施,确保任务的顺利完成。如海豚之星APe15小搬机器人搭载自研 AI 调度算法与实时数据分析系统,可动态优化路径与负载,助力客户回本周期缩短 30%。
①路径规划与避障:
基于卷积神经网络(CNN)的AI算法,支持动态避障和路径重规划,确保毫米级精准操作。
②智能运维决策:
通过云脑大数据分析机器人运行状态,预测设备故障并生成维护策略,故障诊断准确率达99.2%。
③多任务并行处理:
海豚之星机器人支持人机共存模式,可根据任务优先级自动调整作业队列,实现多场景灵活切换。
自主决策技术使搬运机器人车在工业场景中已实现无需人工干预的连续作业,良品率提升至99.99%。
四、群体协同:集群调度的“群体智能”
海豚之星通过群体智能协议栈实现多设备协同作业。海豚之星机器人自主研发的 RDS智能调度系统,实现了多台搬运机器人及其他物流机器人的高效协同作业。其能够实时监控机器人的位置和状态,根据任务需求合理分配任务,并协调机器人的运行路径,避免碰撞和拥堵。在实际应用中,多台海豚之星搬运机器人可以通过调度系统实现协同作业,完成复杂的物流任务,提高工作效率和整体运营效益。例如在仓库中,多台机器人可以协同完成货物的搬运、堆垛等任务,实现物流的自动化和智能化。

①多机协同算法:
开发基于云脑计算的分布式调度系统,支持数百台车辆同场调度实现协同作业,通过RCS(机器人控制系统)实现任务动态分配与资源优化,群体效率达到人工团队的15倍。
②跨设备协作:
与立库、自动化产线等设备无缝对接,支持与机械臂、输送线的自动交互,形成全链路智能物流体系。
③全球化适配:
通过多语言指令解析技术,实现跨国仓储网络的标准化接入,支撑海外项目部署。
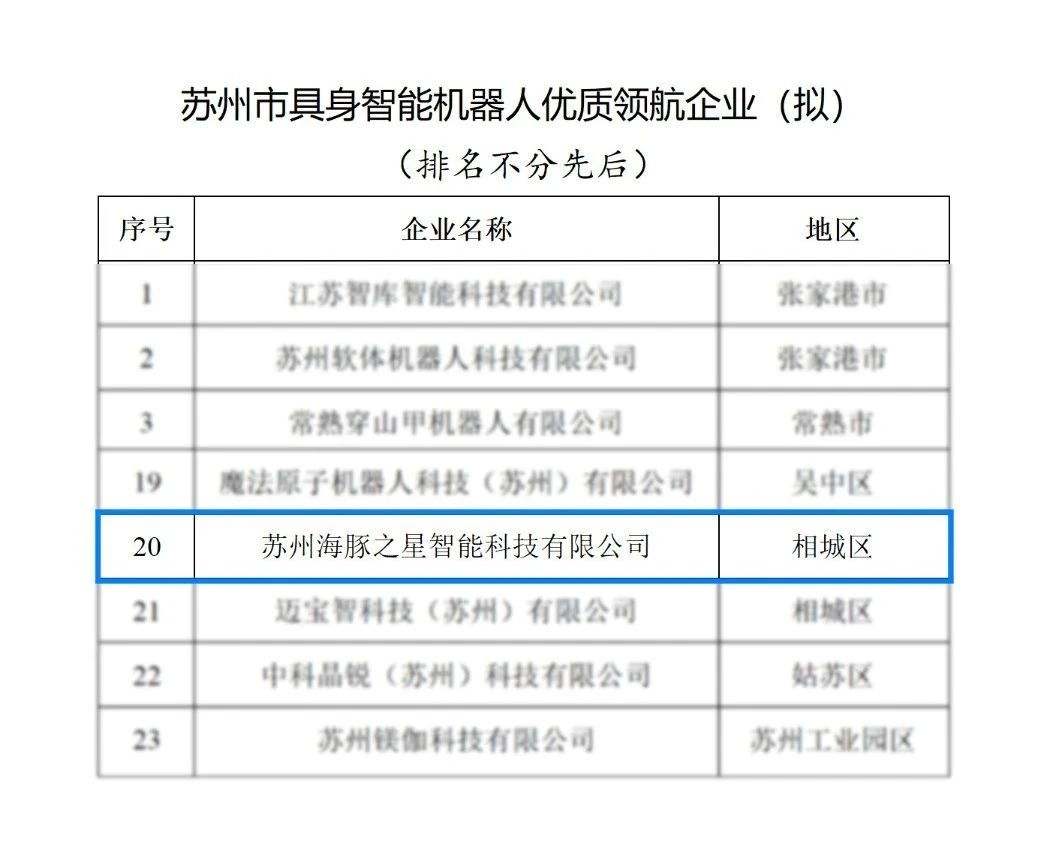
2025年,海豚之星入选“苏州市具身智能机器人优质领航企业”,其搬运机器人系列产品已覆盖3C、新能源、汽零等多个行业,市场占有率持续提升。

总结
具身智能四大核心技术在搬运机器人行业的应用,推动搬运机器人从单一自动化设备向“感知-决策-执行-协同”全链路智能化跃迁。随着技术迭代与产业生态完善,搬运机器人将在制造业、仓储物流等领域进一步释放效率潜力,成为智慧工厂的核心节点。
作为智能物流解决方案领域的企业,AiTEN海豚之星始终聚焦“智慧工厂”场景,深度整合技术创新与行业需求,已为全球200余家制造业客户提供全方位服务:依托全系列搬运机器人产品矩阵覆盖多样化搬运场景,自研行业级智能调度系统实现多设备高效协同,并通过覆盖售前规划、部署实施到运维优化的全生命周期服务体系,助力企业实现物流智能化转型,持续赋能制造业数字化升级与高质量发展。