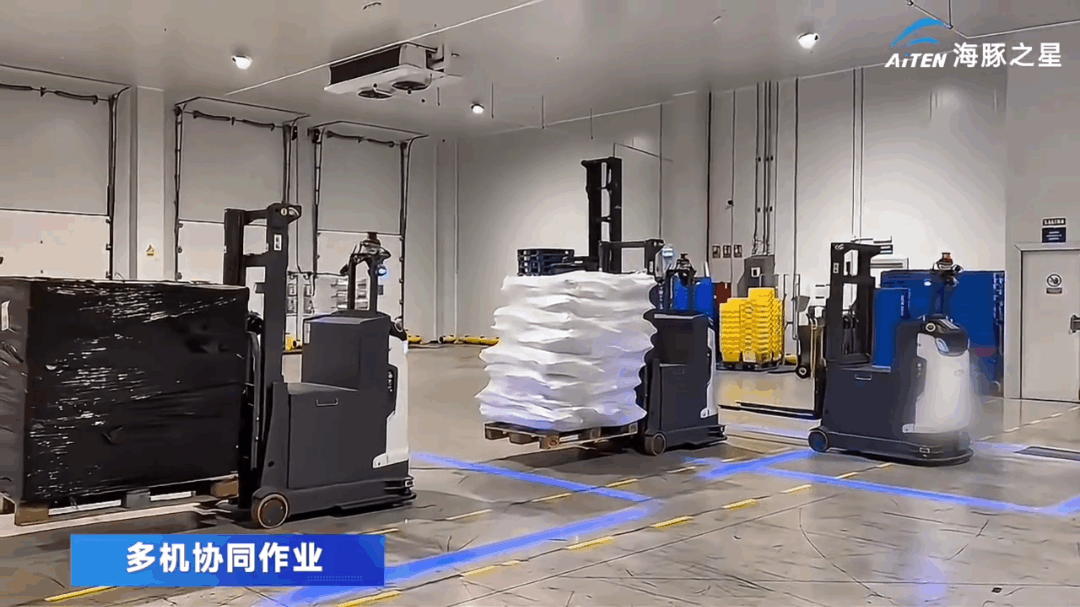




AGV叉车主要导航方式
- 2021-08-06 15:40:46
- 157
- 0
AGV叉车首要导航办法
AGV叉车主动扶引体系有磁导航、激光导航、电磁导航、光学导航、惯性导航、视觉导航等,现在干流运用的是激光导航、电磁导航和视觉导航。
1、激光导航
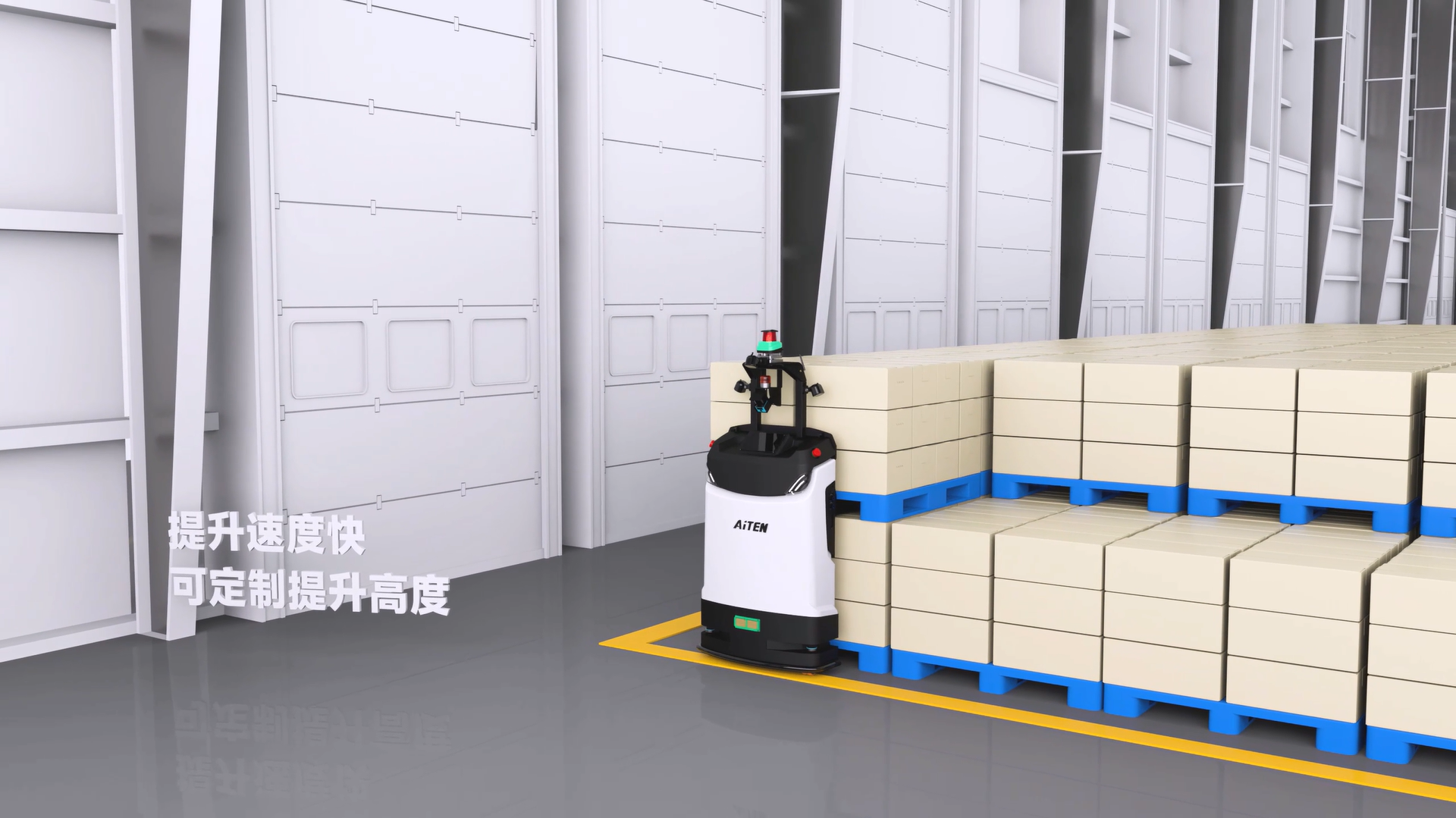
在AGV跋涉途径的周围装置方位准确的激光反射板,AGV通过发射激光束,一同收集由反射板反射的激光束,来确认其当前的方位和方向,并通过连续的三角几许运算来实现AGV的导航。激光导航跋涉途径可灵敏多变,能够合适多种现场环境,缺乏的则是高昂的成本和对环境较严苛的要求。
2、电磁导航
电磁导航是较为传统的导航办法之一,现在仍被采用,无人叉车是在AGV的跋涉途径上埋设金属线,并在金属线加载扶引频率,通过对扶引频率的识别来实现AGV的导航。利益是成本较低及便于控制,但跋涉途径难以更改扩展,对复杂途径的局限性大。
3、视觉导航
视觉导航,又称VSLAM,即一同定位与地图构建,是指通过对各种传感器数据进行收集和计算,生成对其自身方位姿态的定位和场景地图信息的体系。它能够从环境中获取海量的、富于冗余的纹理信息,拥有较强的场景辨识才干。利益是成本较低,具有环境自适应才干,柔性强。未来机器人是此类导航技术的代表。