



AGV无人叉车一步步地摆脱环境的限制
- 2019-05-20 19:15:54
- 147
- 0
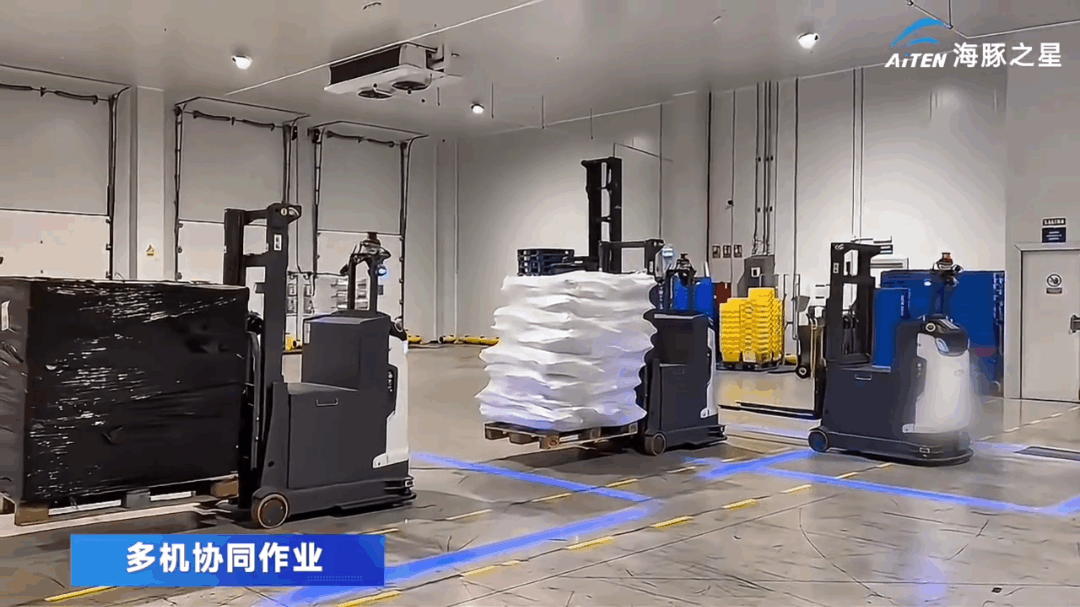
从磁条和电磁导航技术,到二维码导航技术,再到激光SLAM与视觉SLAM技术,AGV无人叉车导航技术已更新到第三代,AGV无人叉车本身也在一直不断地更新、升级中成长着,它正在一点一点地摆脱周围环境的限制,逐渐能够实现自动化管理。
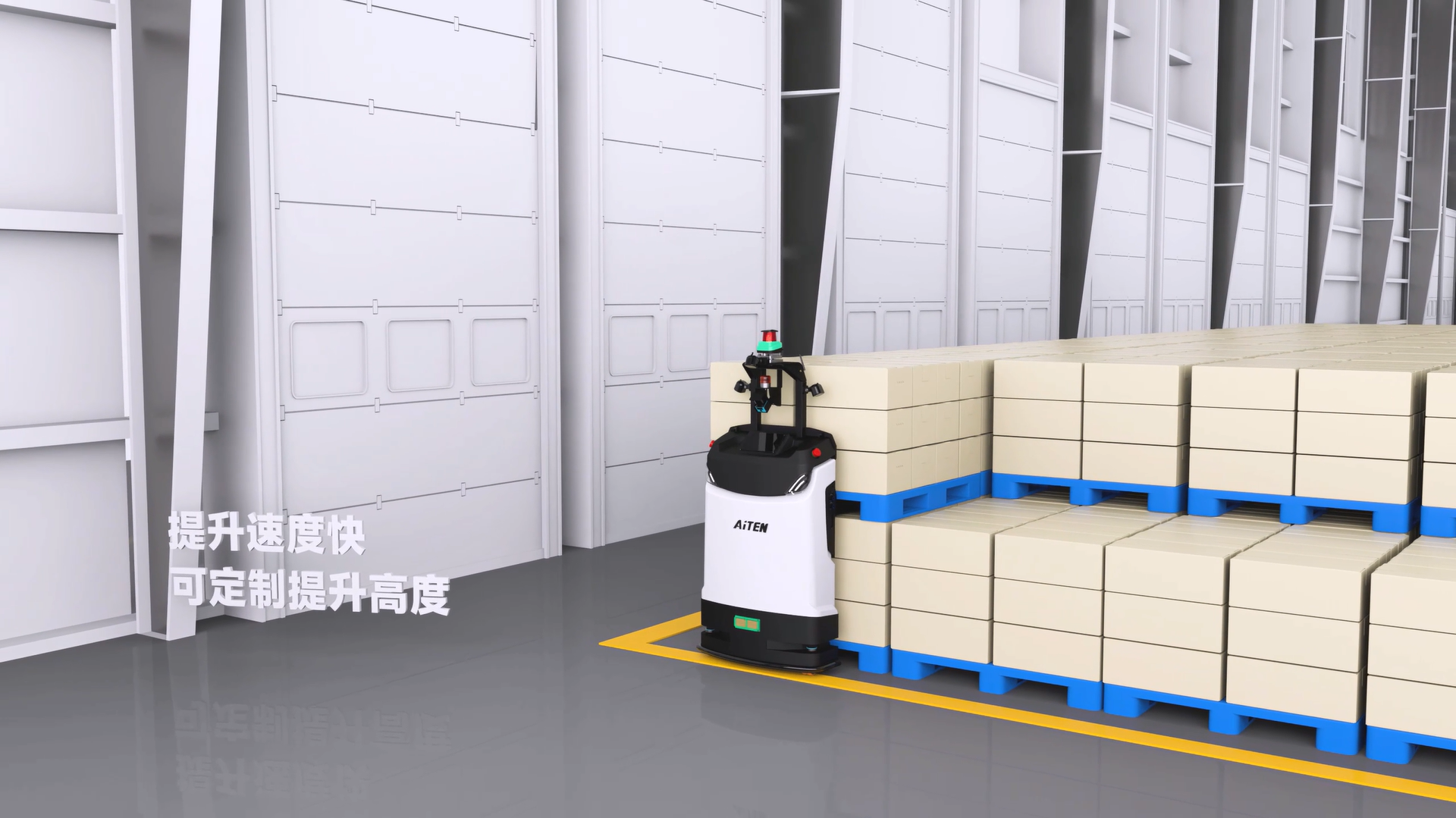
磁条和电磁导航技术是依赖磁条、磁钉等辅助工具来规划路径,具有不易更改路径,而且铺设麻烦等缺点存在,但其成本不高。二维码导航技术又称惯性导航,它主要是利用陀螺仪、加速计、计算机视觉的技术,因为陀螺仪具有精确的指向特点,能够随时为AGV无人叉车提供正确的方向,而加速计能够计算出AGV无人叉车所需行驶的距离,然后通过计算机视觉识别出二维码用来确定AGV无人叉车所在位置或者下一步操作所需到达的位置,这样AGV无人叉车就可以按照规划好的路径或者实时记录路径来进行行驶、运输操作。相比于***代导航技术来说,惯性导航灵活性更高点,而且二维码铺设起来也相对简单,但是缺点就是容易磨损,精确度不高。第三代AGV无人叉车导航技术,主要采用激光SLAM或视觉SLAM技术,被称为自然导航。它利用激光雷达或摄像头这些设备来对周边的环境进行扫描,然后通过计算机软件算法来构建实时地图从而能够实现自主导航。激光SLAM导航和视觉SLAM导航两者的原理基本相同。激光SLAM是利用激光雷达来扫描周围环境,再通过软件来构建地图,而视觉SLAM是利用摄像头拍摄的图像来构建地图。前者优点在于其技术成熟、精度高、可靠性高、易于规划路径,但对于环境的高度变化不敏感,斜坡或凸起的物体会被识别成墙壁。而视觉SLAM就不同了,他利用摄像头可以清晰识别出周边环境的对象,例如货架、工人等,摄像头虽然成本不高,但容易被光线所影响,而且算法难度很大。
激光SLAM和视觉SLAM这两种导航技术虽各有好坏,但两者结合起来便将是***的方案。