



盘点市面上AGV无人叉车3大导航技术
- 2022-05-27 08:33:50
- 171
- 0
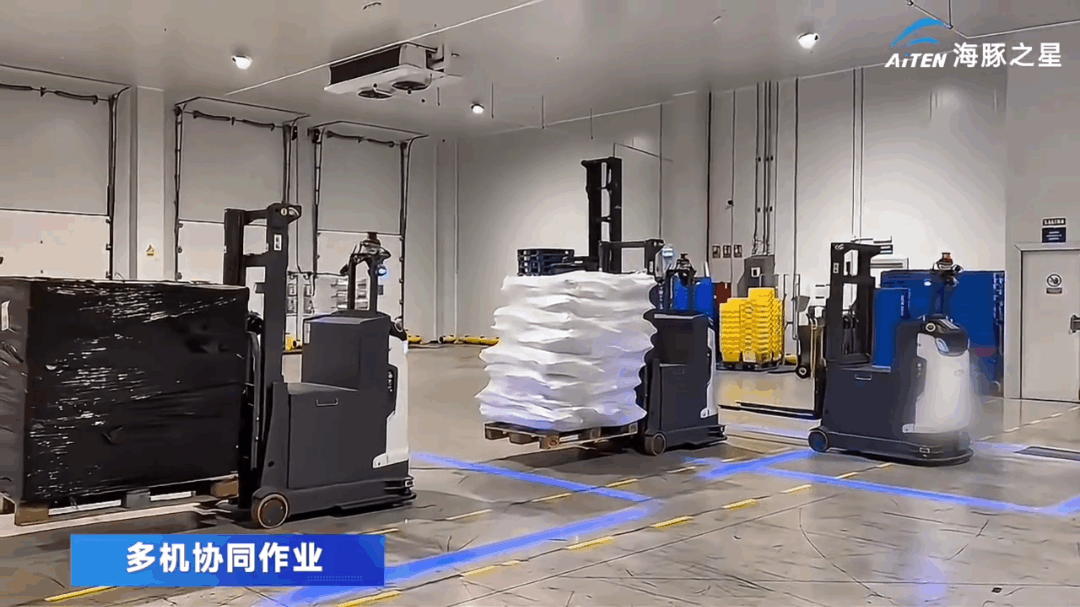
随着生产生活智能化的发展,一些制造行业、物流仓储等领域逐步采用智能化AGV智能搬运机器人,来提高企业生产效率,降低生产成本。2019年全国agv无人叉车销量在2000台左右,市场规模十多亿元,过去3年的复合增长率超过50%。
经过调研发现在无人叉车导航方面,目前市面上的agv无人叉车主要使用3种导航技术:激光导航技术、磁导航技术和视觉导航技术。
1、激光导航的基本原理与激光测距相同,即机器通过测量激光从发出到接收的时间计算出自身相距前方障碍物的距离。只不过激光测距测量1次即可,而激光导航则是需要进行更多点位的测距,以此标定机器自身的位置。
2、磁导航几年前已经很成熟的了,依靠铺设在地面上的磁条导航行驶,在agv无人叉车底部安装磁条感应器,系统计算磁条与车子中间的相对位置,实时调整行驶,达到自动行驶;激光导航这几年越来越受欢迎,主要不用任何导轨就能导航行驶,激光导航传感器发射激光束,获取周边环境的激光数据,构建导航地图,实现导航定位。
3、视觉导航技术是国内较为先进的agv无人叉车导航技术,以相机作为主要传感器,通过视觉信息来感知环境,将各种环境信息保存为离线地图,在机器人运行时基于实时图像和离线地图的信息匹配,对机器人进行定位和导航。
视觉信息是所有传感器信息里最为丰富的,因此能够从环境中提取的信息也最为丰富,能够构建多维度、多模态的环境地图,实现更稳健和适应性更强的定位导航算法。
机器人通过车载相机得到实时图像,从中提取高辨识度信息,和离线地图中的信息匹配,从而知道自己在地图中的位置,以及下一步往哪个方向行动。