



你还不知道自动搬运机器人控制器原理?
- 2022-04-22 10:44:57
- 153
- 0
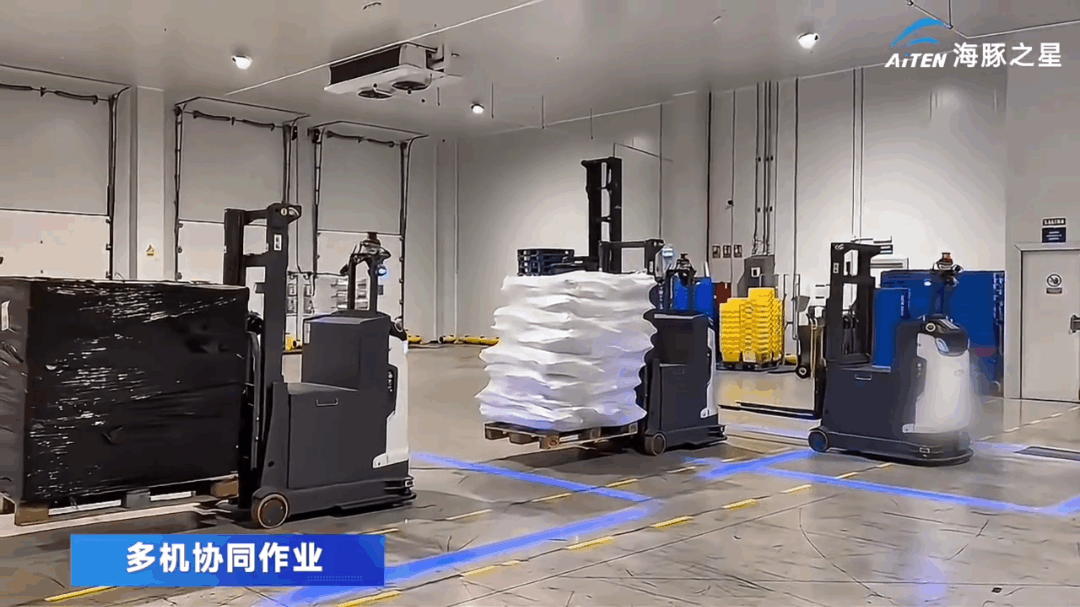
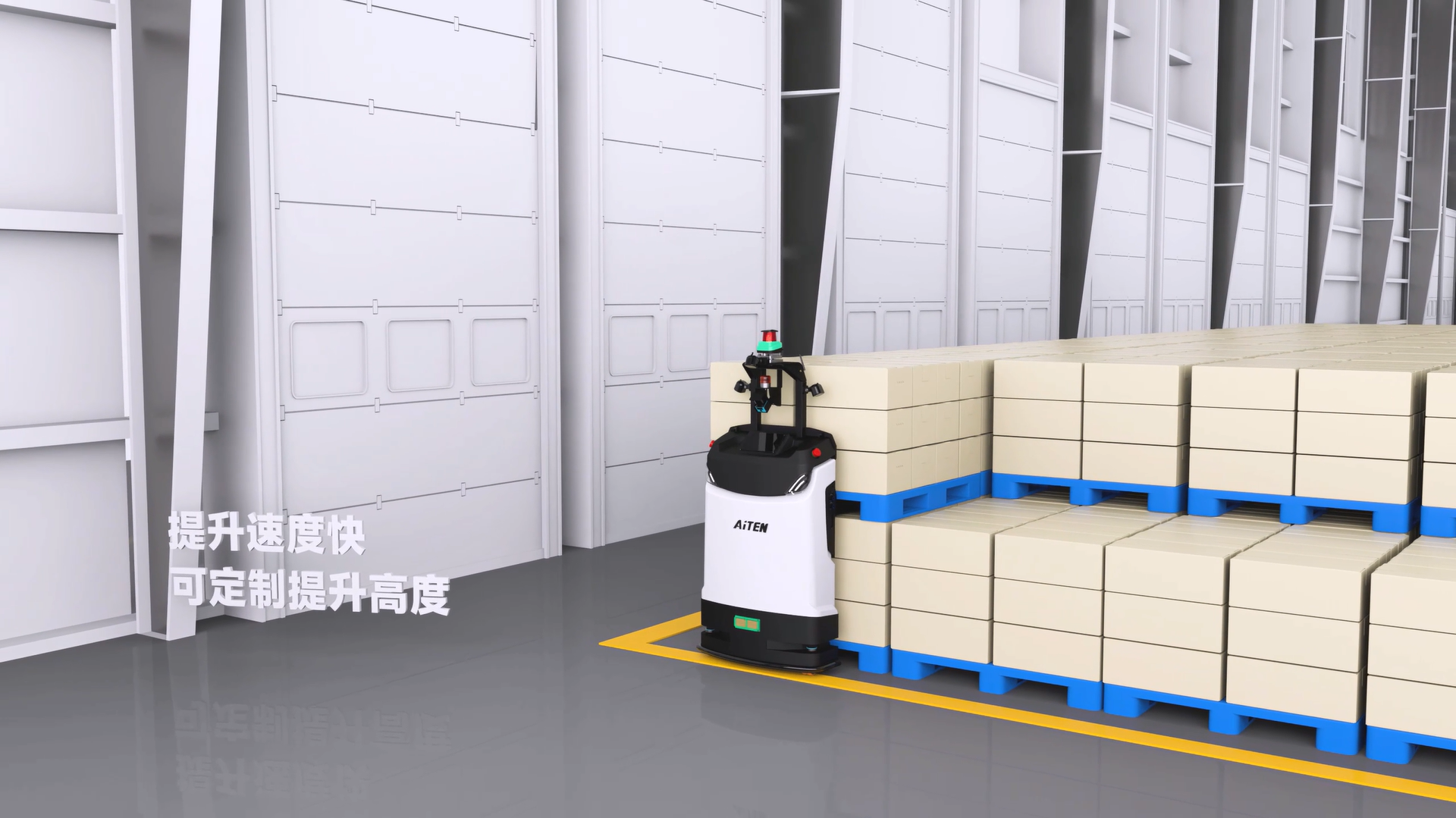
智能自动搬运机器人作为自动化运输搬运的重要工具,技术上已经很成熟,在智能工厂已经得到广泛应用,可以做到将物料准确、安全、智能地运输到目标站点。这里我们主要和大家谈的是搬运机器人的控制器基本原理。
1.模糊控制器
该系统的核心部分为“模糊”控制器,有三个主要部分组成,它实现控制主要是利用计算机的程序逐一实现,首先求出系统的给定值、反馈值存在的误差值e,再计算出误差的变化率ec,即de/dt对误差进行积分,其次模糊化输入量,相继求出控制规则(R),模湖的推理与判决。
2.视线导航器
通过运用计算的航向和视线角产生的误差,将其作为“闭环反馈”的控制量,它能够决定角速度,然而前进的速度由路面在前方具有的曲直程度与角度间存在的误差所决定,将自动搬运机器人的当前位置至跟踪的轨迹线上垂足视为初始的期望点,在其基础之上权衡视线的距高,能够节省在路径行驶中的能耗,在实现提前控制中,令跟踪控制提升了智能性能。