



AGV叉车的工作原理
- 2021-08-06 15:39:08
- 153
- 0
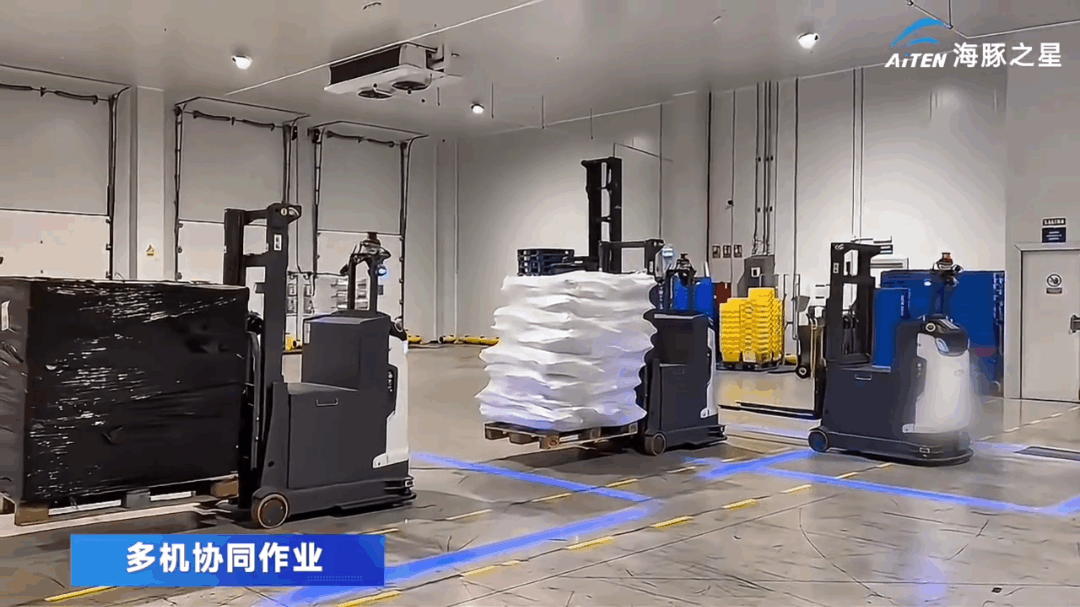
AGV叉车的作业原理
AGV叉车的作业动作序列为:
AGV叉车通过传感器搜集环境信息,中心控制器(中控系统)根据搜集的信息绘制场景地图;
接受到出入库指令,中心控制器结合场景地图、AGV叉车的其时坐标及运动方向计算出***的行驶路线,并调度AGV叉车执行使命;
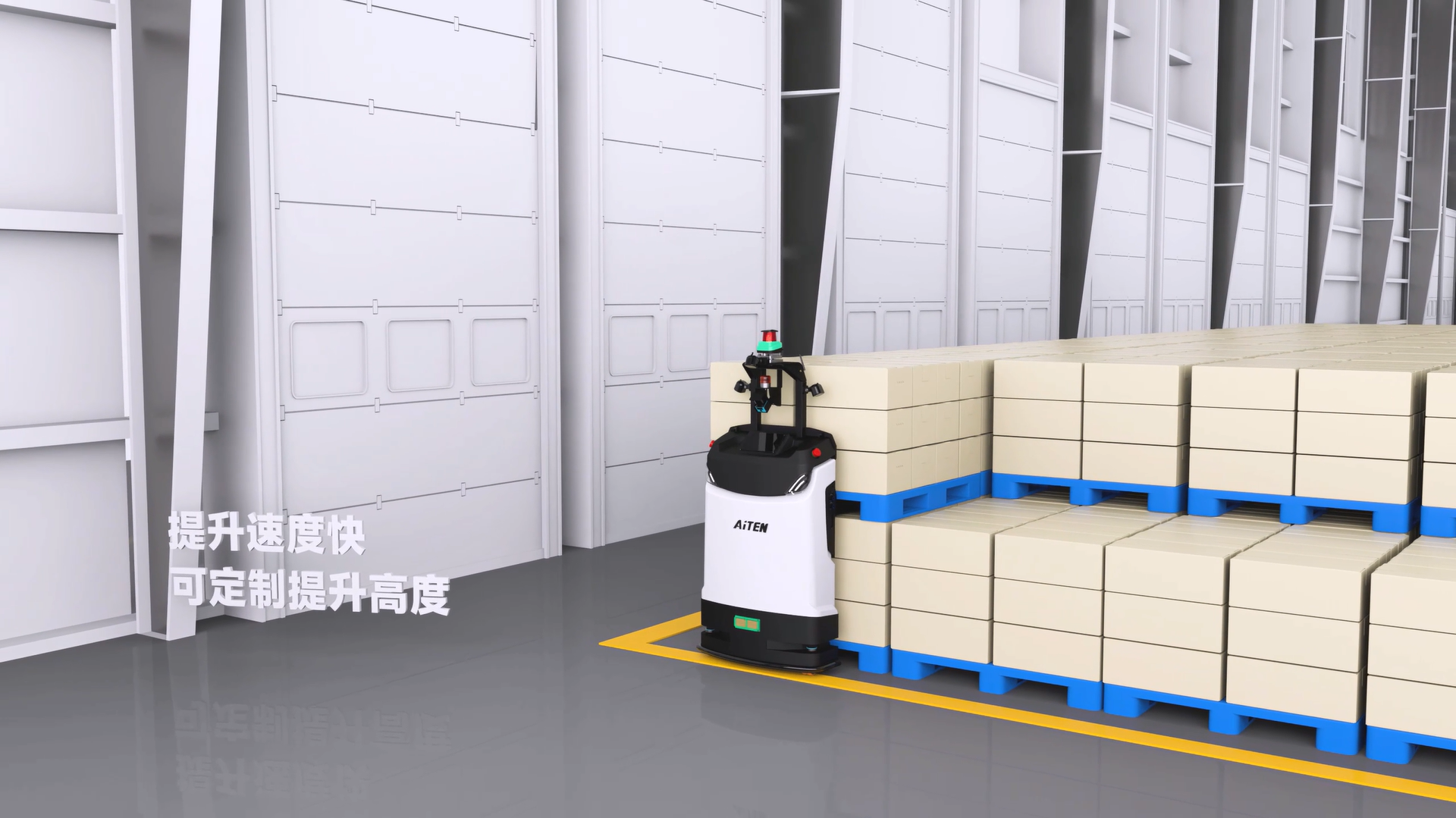
叉车到达方针方位后,根据货品的托盘方位和位姿,自适应取走货品,搬运至结尾方位、卸货,并向中心控制器陈述其方位和状况;
随后回到待命区域,等待新的使命指令。
AGV叉车的作业原理
AGV叉车的作业动作序列为:
AGV叉车通过传感器搜集环境信息,中心控制器(中控系统)根据搜集的信息绘制场景地图;
接受到出入库指令,中心控制器结合场景地图、AGV叉车的其时坐标及运动方向计算出***的行驶路线,并调度AGV叉车执行使命;
叉车到达方针方位后,根据货品的托盘方位和位姿,自适应取走货品,搬运至结尾方位、卸货,并向中心控制器陈述其方位和状况;
随后回到待命区域,等待新的使命指令。